|
|
|
|
|
|
|
|
|
|
|
(coming soon) |
|
|
|
|
|
|
|
 |
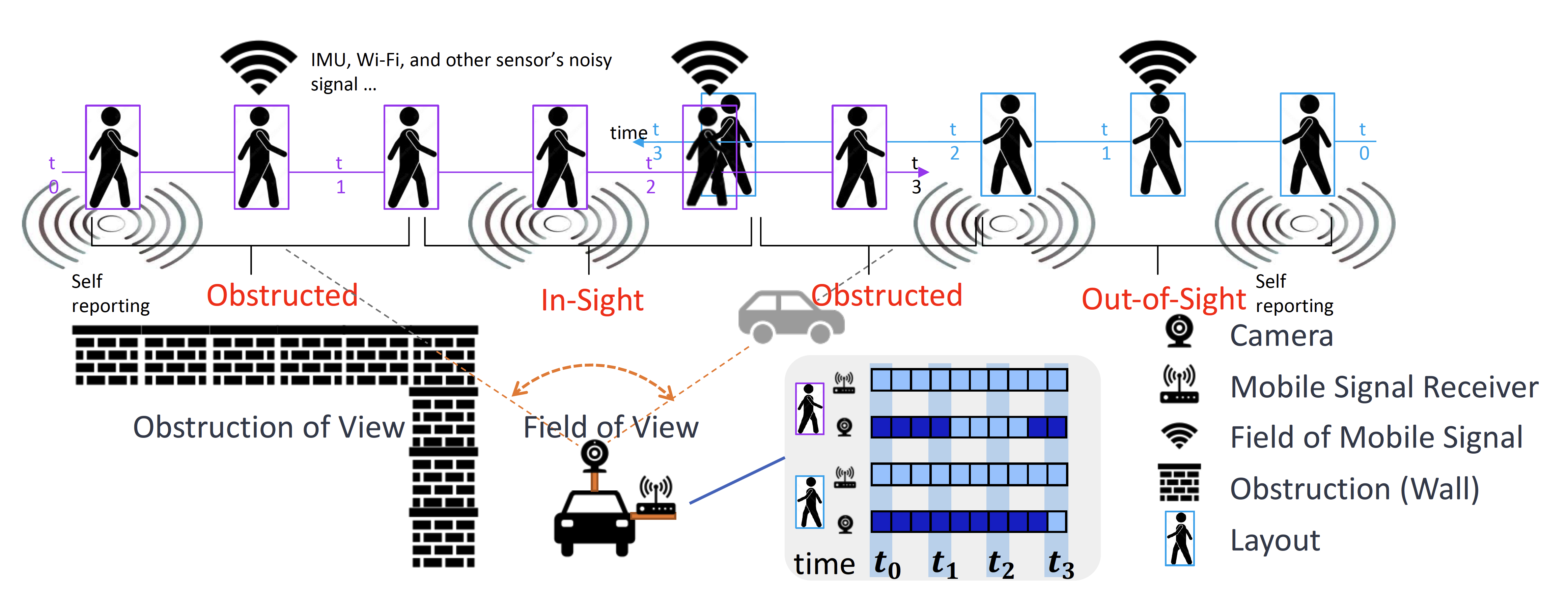
Haichao Zhang, Yi Xu, Hongsheng Lu, Takayuki Shimizu, Yun Fu Layout Sequence Prediction From Noisy Mobile Modality ACM MM, 2023 (Paper) |
|
|
Two-minute papers
|